Bionischer Greifer
Christian Teissl und der Jahrgang WING.vzB.16, Sommersemester 2018
Kooperationspartner: Center for Rapid Innovation, das Fablab der Werkstätte Wattens
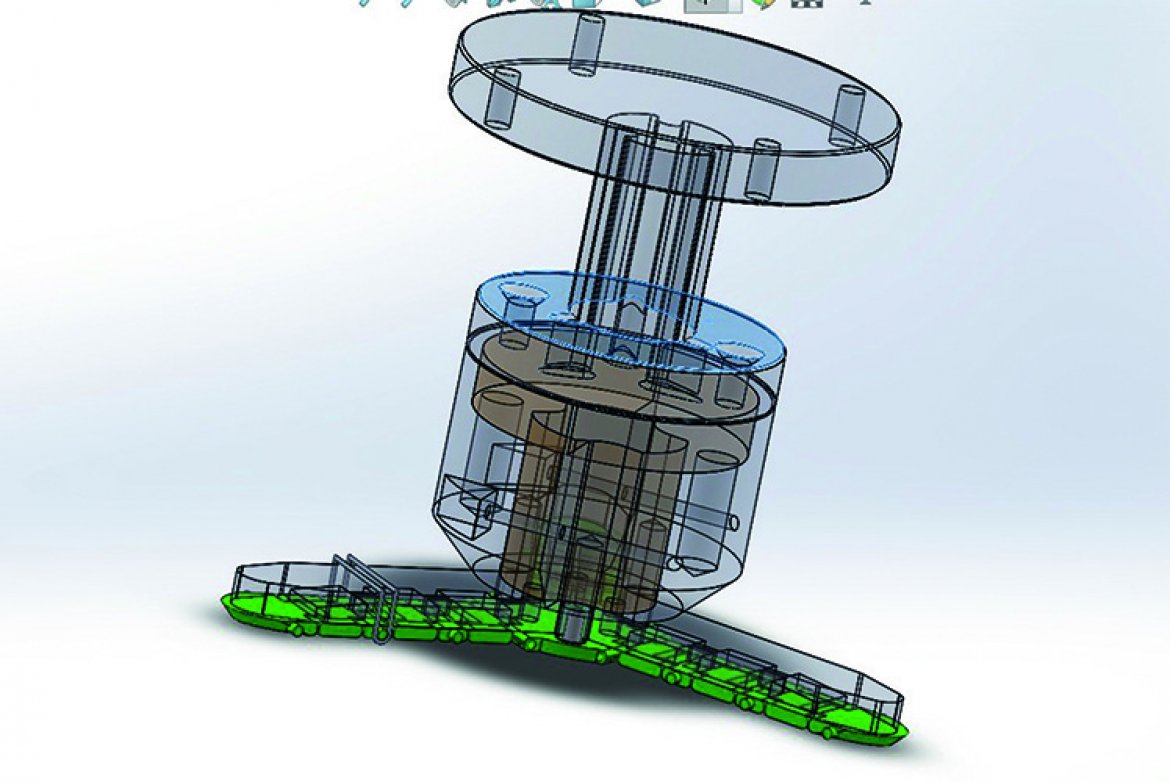
Die Evolution hat über Jahrmillionen das Aufnehmen von Gegenständen bei Mensch und Tier perfektioniert. Soft-Gripper haben dabei den Vorteil, dass sie Gegenstände unterschiedlichster Form und Größe schonend mit einer „eingebauten Fehlertoleranz“ fassen können. Die Aktorik wurde mittels eines pneumatischen Muskels umgesetzt. Das Team fertigte dafür mittels 3D Druck Gussformen an, welche mit flüssigen Gummi gefüllt wurden; definierte Rippen geben die Bewegungsrichtung vor. Zur Erhöhung der Stabilität und Genauigkeit werden diese mit einem 3D gedruckten Exo-Skelett verbunden. Die Bauteile wurden über mehrere Iterationsschleifen mittels Rapid Prototyping optimiert.